Prehistoric Rock Art and Historic Mining Structures Basin and Range National Monument
BLM archaeology at the cutting edge
Documentation and 3D Visualization
New approaches to preservation
Explore Lincoln County's Past
Take a Virtual Tour
About the Pilot Study
Cutting Edge Documentation of Significant Archaeological Resources
Eastern Nevada’s prehistoric rock art and historic mining sites have been extensively documented and researched over the years – so what’s the point of this project? To test whether new documentation techniques, collectively referred to as 3D documentation, would be useful in the recording, preservation, and interpretation of archaeology in Lincoln County.
We designed a pilot project to document a sample of previously recorded archaeological features using the latest 3D documentation techniques. This is the first step in evaluating the applicability and usefulness of these techniques under the following hypotheses:
Data Quality - 3D techniques collect data superior in detail and quality to that of older techniques alone
Preservation – 3D techniques create a "snapshot in time" to preserve virtual records of endangered sites and inform future investigation of site conditions
Research and Education – 3D techniques provide virtual data for use by researchers and the general public
Accessibility – 3D techniques provide an accessible experience to people who may not be able to visit in person
Interpretation – 3D techniques expand interpretive possibilities
The project sample contains features from three archaeological sites in the Basin and Range National Monument: rock art at two prehistoric sites (one located in a steep, rocky canyon and the other situated on a heavily traveled road), and mining structures at a historic silver mining site. If this pilot project suggests 3D documentation techniques are indeed a useful approach to add to the preservation toolbox for the Monument, additional work on more site types should follow.
This website hosts all of the 3D "interpretive objects" produced by the pilot project, along with supplemental 2D background information like conventional photographs, sketches, and descriptions. It uses a customized version of Arches, a web database platform designed specifically to inventory cultural resources and facilitate online interaction. Thanks to its flexible structure and open-source nature, the Basin and Range National Monument 3D Documentation Pilot Study website allows the future addition of new interpretive objects, background material, and other data as they become available.
Our Process
3D Documentation
This pilot project utilized three different 3D documentation techniques: LiDAR, photogrammetry, and 360 degree virtual tours. LiDAR technology was used to capture the overall sites, including the structures, topography, and natural context of boulders and vegetation. Photogrammetry was used to capture the more detailed and smaller scale rock art panel features. Taking 360 degree photographs enabled the creation of panoramic "virtual tours" to help convey the feeling of standing in each site.
LiDAR
LiDAR involves the use of a laser scanner, which sends out a controlled laser beam that rapidly measures objects. Every time the laser hits an object, a signal is sent back to the machine, ultimately recording the surface of the object. A laser scanner can collect up to 50,000 measurement points per second. Often 360 degree photographs are taken at the same location of a laser scan, so that accurate color values can be attached to the 3D data.
Using LiDAR to digitally scan a site, feature, or structure is different for every project. Depending on the desired outcomes and deliverables expected, the strategies involved can vary widely. For the most part though, the equipment used is similar. For the Basin and Range National Monument 3D Documentation Pilot Project, we used a Leica Scan Station C10 (fully robotic laser scanner), two heavy tripods and tribrachs (brackets to mount the scanner on the tripod), batteries to power the scanner, a digital SLR camera, a Nodal Ninja (a mounting arm for the camera), and finally a PC laptop to process the data (not needed in the field).
Once a thorough site inspection has been completed so that scan locations and target locations have been identified, the scanner is set up in its first location. These scan locations are chosen to maximize efficient data collection and wide coverage of the feature being documented. After the appropriate settings are established, the scanner begins operation.
Depending on how much area is being scanned, and at what point density, a single scan can take between 2 minutes and several hours to complete. Each scan location is specifically located to ensure that there is overlap in data between multiple scans. This is important for post-processing efforts once data collection is complete. It is critical to make sure that people and gear stay out of the way of the scanner’s line of site!
Once scanning is completed, we use the digital SLR camera to take the photographs for photogrammetry, collecting HDR (High Dynamic Range) photos at each location. HDR enables the capture of high-quality images that provide more information than standard photography. We also collect raw images for greatest quality and color range. We collect a 365-degree sphere of images that we later stitch together and texture map onto the point cloud data for a more photo-realistic 3D model.
Once scanning and HDR photography is complete at each location, everything is moved to the next location, and the process begins again.
LiDAR Data Processing
Back in the office, LiDAR data processing includes several steps. The first is the process of registration: linking of all the separate scan locations together using the overlap of data captured in the field. Sometimes the software is able to automatically identify common points between scan locations, while other times a person needs to identify the common points manually. Eventually all the individual 3D scan locations are tied together, creating one single “scan world” or 3D model.
The next step is photo-texturing: the process of adding the photo color information to the scan data. Since the scanner only records reflectivity values of the objects and features it scans, this is where the HDR panoramic photos we collect at each location come in. They are merged to create a 360 degree panoramic image which is aligned and applied to the scan data.
Once registration and photo-texturing are complete, the scan data are ready to be exported across platforms and mined for a wide range of deliverables ranging from interpretive to research.
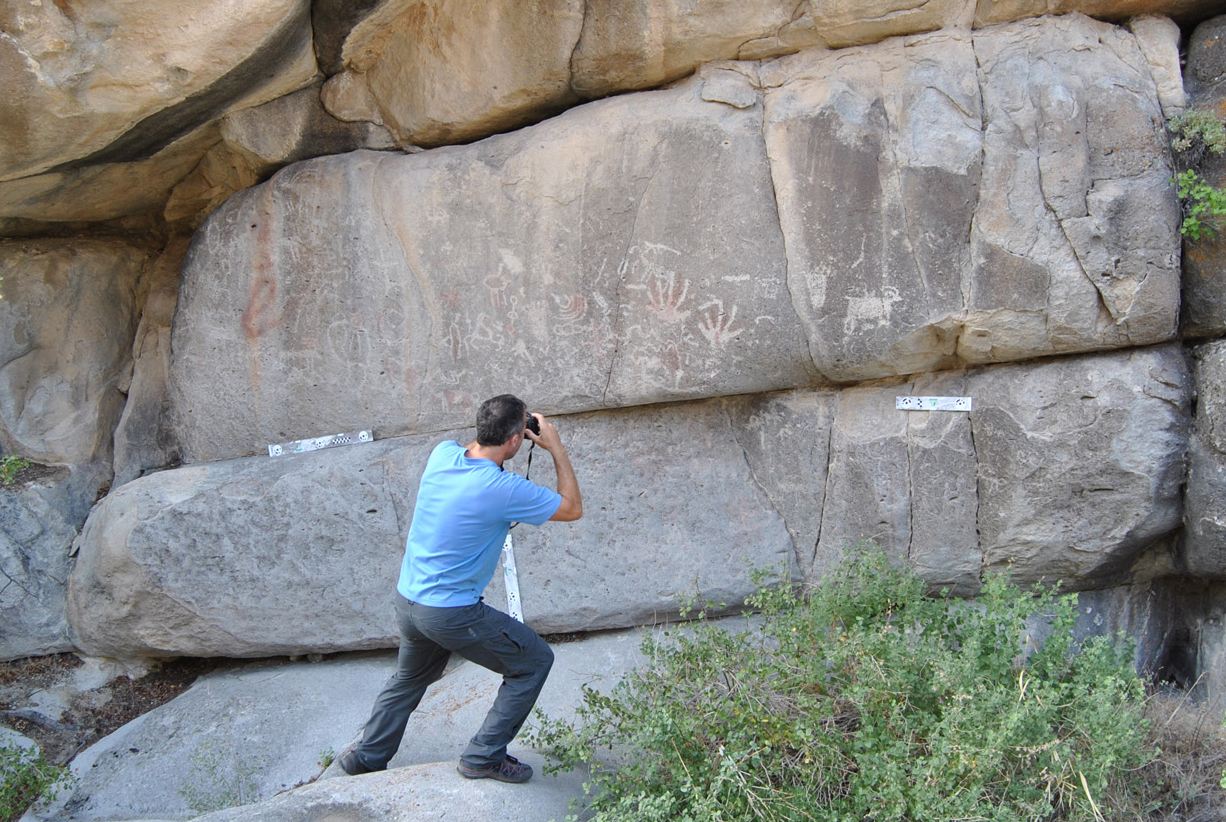
Photogrammetry
Photogrammetry is the practice of using 2D photographs to create 3D digital models. A standard camera, but for this project a digital SLR camera, takes several photos of a subject, making sure each photo contains overlapping information, as well as photos from several different vantage points. These photos are then uploaded to a specific software that identifies the overlapping data and ultimately stitches all of the photos together, creating a 3D digital model. In order to scale the 3D digital model, scales were included in the photos.
There are two basic types of photogrammetry documentation: aerial and close-range. For this project close-range photogrammetry was utilized due to the relatively small object sizes being documented. Aerial photogrammetry is used to capture larger landscapes and terrain.
The BLM, and specifically the BLM’s national center in Denver, has been practicing close-range photogrammetry since the late 1980s. The BLM’s national center in Denver has also been a training resource for the Center of Preservation Resource (CoPR) at the University of Colorado, Denver. Therefore, the techniques used by CoPR to digitally document the rock art panels for this project closely follow the processes outlined in the BLM’s Technical Note 428: Aerial and Close-Range Photogrammetric Technology: Providing Resource Documentation, Interpretation, and Preservation.
To learn more about the BLM’s photogrammetry technical bulletin and the techniques utilized to digitally document the rock art panels for this project, use this link: Technical Note 428
360 Degree Virtual Tours
In an effort to capture the context of the three Archeological sites, 360 degree photography was taken throughout the sites. These 360 degree photographs create panoramic images, that when viewed using specific software, allows a viewer to pan-around 360 degrees, as if standing at the site. For this project, the 360 degree views were assembled together creating virtual tours of the site.
Revealing New Knowledge
Explore Lincoln County's Past in 3D
For thousands of years, people have inhabited and left their mark on what is now Lincoln County. Prehistoric Native Americans occupied the area as early as 10,000 years ago or more, with multiple groups expressing a variety of regional adaptations over the following centuries. Later groups like the Fremont and Ancestral Puebloan/Virgin Branch Anasazi were centered further east and south, but their reach extended into eastern Nevada and left additional clues behind. Southern Paiutes have occupied Lincoln County for centuries and continue to shape the region today. Explorers, ranchers, farmers, and miners arrived in the 19th century with their own adaptive trends, adding new types of sites and features to the landscape. Today, Lincoln County’s archaeological sites are an attraction all their own, seeing visitation by tourists and recreationalists from around the world.
To help preserve the rich archaeological heritage of Lincoln County, the BLM has established a number of Areas of Critical Environmental Concern (ACECs). These are areas within existing public lands that require special management to protect significant or endangered resources (among other things). Two of the sites documented as part of the 3D Documentation Pilot Study are part of the Mt. Irish ACEC, and one is part of the Shooting Gallery ACEC. The three pilot sites are also part of the Basin and Range National Monument.
Established in 1867 as the mill site for the Crescent Silver Mining Company, Crescent City was part of the Pahranagat Mining District – one of the earliest mining districts in eastern Nevada.
The community was small and short-lived because the nearby mines did not produce enough ore to be profitable, but it did have a permanent population of mine and mill workers who built their own residences near their workplaces. A successor company, the Alameda Silver Mining Company, dismantled the mill and moved it to another, presumably more promising, location around 1873. This marked the end of Crescent City, except for several small resurgences in the early 20th century which did not result in long-term occupations.
The Basin and Range National Monument 3D Documentation Pilot Project documented two surviving architectural resources at Crescent City: the tall brick chimney of the departed stamp mill, and a stone cabin constructed by an unknown resident. These features were chosen for the pilot project because they have a great deal of interpretive value – they not only illustrate the vernacular architecture of mining, but reflect the substantial (and sometimes ill-advised) investment of capital and optimism which strongly influenced the development of Lincoln County during the late 19th century.
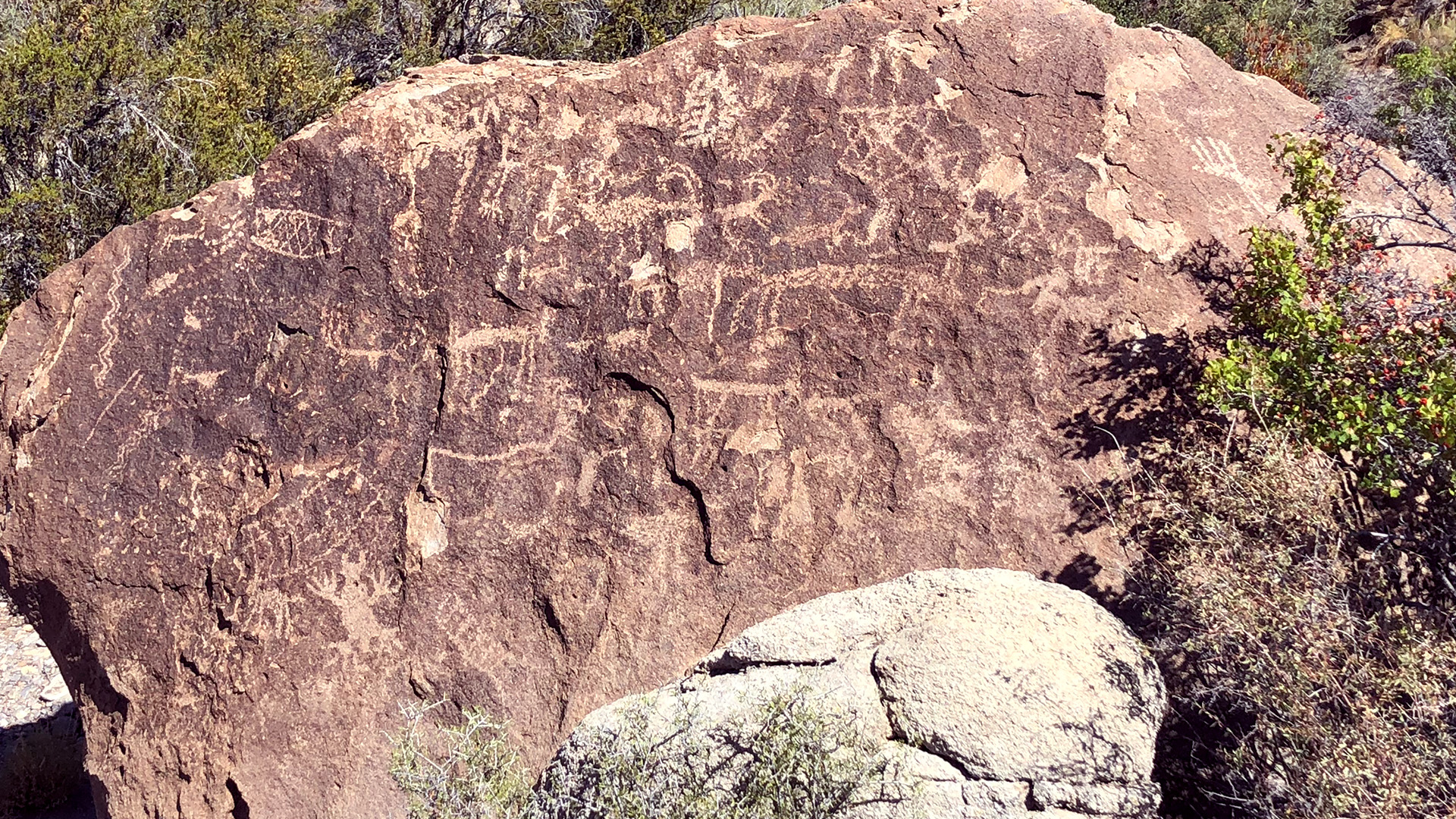
The site’s panels (all petroglyphs) are representative of the Basin and Range tradition, which dates from 8,000 BP to the contact period. Their motifs include anthropomorphs, zoomorphs, and abstract designs like circles, spirals, rows of dots, ladder-like designs, rectangles with internal decoration, rake-like designs, meanders, arcs, and lines. Several circles are bisected by a vertical line, possibly a schematic portrayal of atlatls that would indicate a Middle to early Late Archaic date (ca. 3,000 to 1,000 BP) for some of the site’s rock art. Scratched graffiti dating from the 1940s to the present is a testimony to the fragility of the site and the ongoing threat of vandalism. Natural exfoliation of the outcrop has also damaged the site’s rock art.
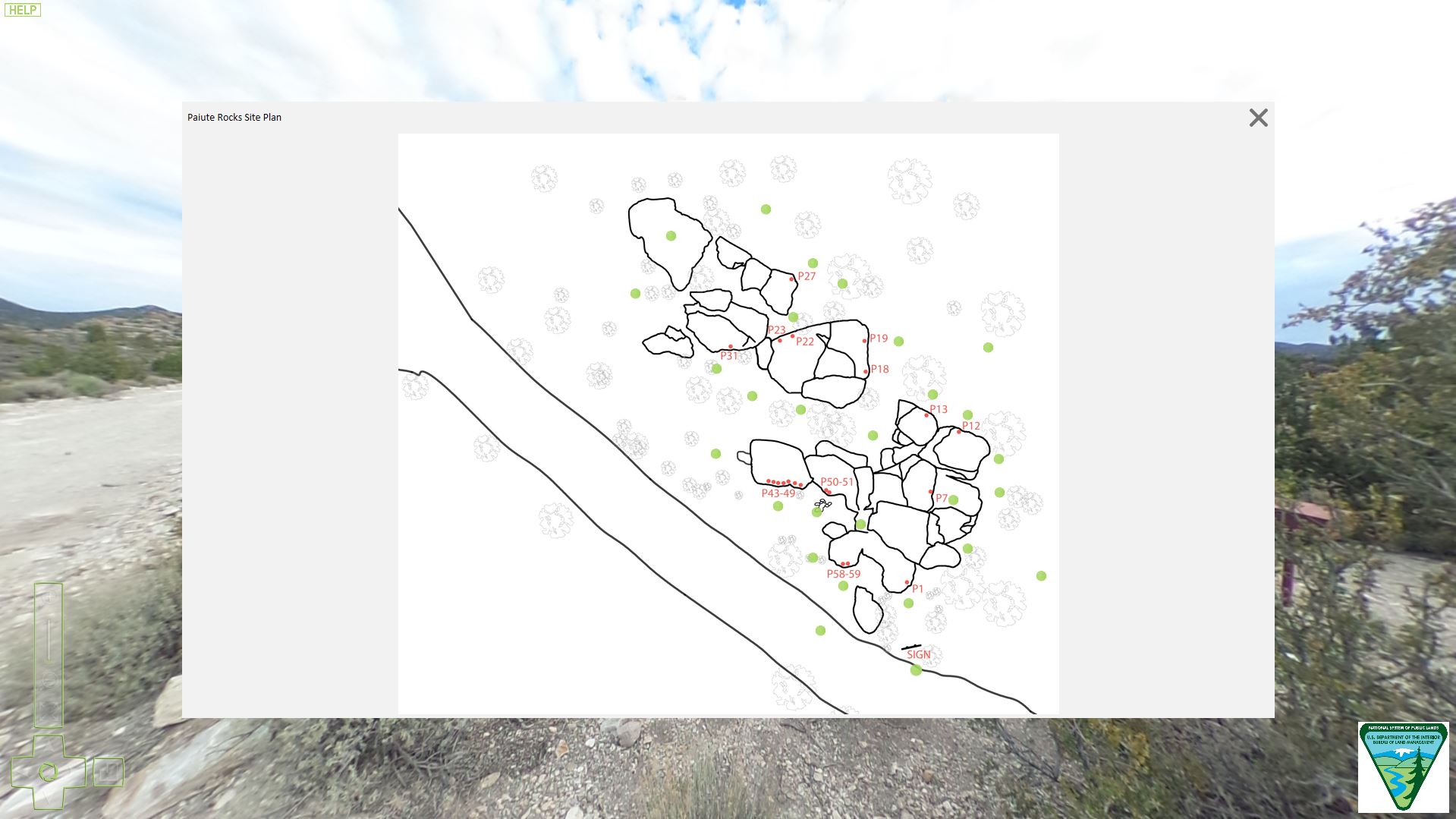
The Basin and Range National Monument 3D Documentation Pilot Project documented a selection of rock art panels at Paiute Rocks, chosen to illustrate the range of conditions at the site and to take a “snapshot in time” to fully document current conditions and help inform potential repair and restoration work in the future. The project also documented the site’s entire outcrop at a lower resolution in order to capture the larger setting and context of the rock art panels.
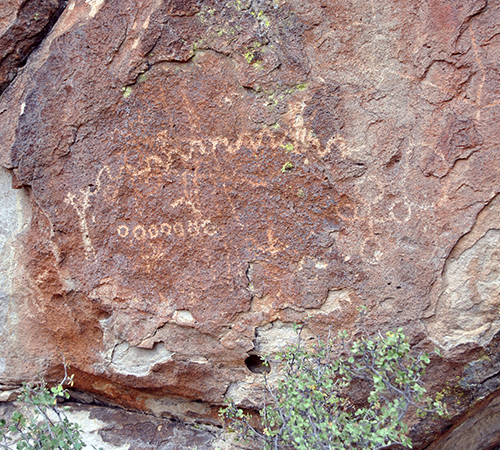
The site’s panels include both petroglyphs and pictographs which are primarily representative of the Basin and Range tradition, and are notable for their range of motifs and, in some cases, their densely packed designs. One panel features an unusual combination of techniques, with red pigment in-filling a concentric circle petroglyphic motif. Several Pahranagat-style anthropomorphs are also present, and one anthropomorph type may be Fremont in style. One of the Pahranagat anthropomorphs appears to hold an atlatl-like object, which may indicate a Middle to early Late Archaic age range (ca. 3,000 to 1,000 BP). Red Pigment Canyon/Shooting Gallery III is difficult to access, requiring a short hike in from the nearest road, and the panels in the upper part of the canyon require some scrambling to access.
The Basin and Range National Monument 3D Documentation Pilot Project documented a selection of rock art panels at Red Pigment Canyon/Shooting Gallery III, as well as the general setting of the canyon to capture the context of the panels. Because this site is remote and difficult to access, it is a good candidate for viewing and interpretation through online “virtual site access.”
The Bureau of Land Management administers the Lincoln County Archaeological Initiative (LCAI) to support archaeological projects in Lincoln County and to carry out the archaeological provisions of the Lincoln County Land Act of 2000 (Public Law 106-298) and the Lincoln County Conservation, Recreation, Development Act of 2004 (Public Law 108-424). Projects funded by the LCAI focus on the inventory, evaluation, protection, and management of unique archaeological resources in Lincoln County, NV. Projects must be within Lincoln County and address specific priorities.
Contact Special Legislation Ely District
Ely District Office
702 N. Industrial Way
Ely, NV 89301
Contact LCAI Lincoln County, Nevada
Caliente Field Office
PO Box 237
1400 S. Front Street
Caliente, NV 89008
Robert "Jake" Hickerson
Archaeologist, LCAI Project Manager
775-726-8100
This website was built using Arches, an open source GIS-enabled data management system for built heritage. Legion GIS led the development, customization, and data modeling of the Arches site with assistance from Coherit Associates LLC. The project's source code is freely available on GitHub and is using Arches version 6.1. The project's source code was based on the Arches package developed by Global Digital Heritage.